Machine Vision
The Machine Vision feature may be used to configure WAV101 as the foundation of a visual inspection system. Keep in mind that the machine vision feature is a secondary service offered by the motion detector. In other words, both features must be enabled and configured accordingly.
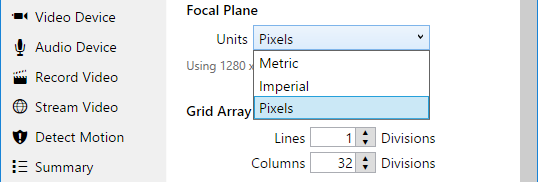
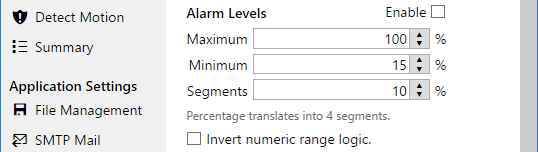
A region of interest may be anchored in the real world by framing it as a Focal Plane. It may be defined in pixels, imperial or metric units of measure. The Grid Array then divides it into grid areas; referred to as segments. These segments are then individually monitored for changes. Keep in mind that the alarm level for each segment is bound by the minimum and maximum values. However, the opposite is true with inverse range logic. In this case, an alarm condition is only asserted when the percentage change falls outside those boundaries. In either case, the number of offending segments is then used to determine whether an alarm is warranted. Be aware that motion zones apply here also.
The Grid View allows the detection process to be monitored through a dedicated window. It buffers event frames for out-of-process, operator inspection. Note that the window must be open for it to collect any event frames. Be aware that the number of event frames is limited due to their cumulative size. They are regularly discarded to prevent the computer from running out of random access memory; RAM. The message count limit itself may be defined using the Properties page. Keep in mind that a second FHD display should be considered with the Grid View as its content compliments that of the WAV101 window.
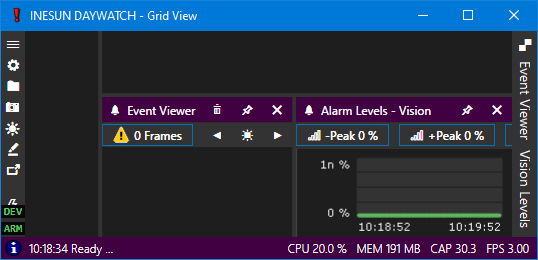
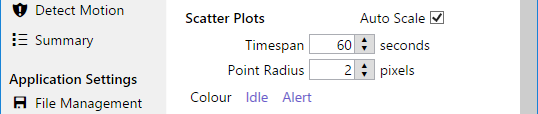
Also note that the Grid View's Vision Levels viewer illustrates the alarm levels for the current and preceding frames; to a maximum of 60 seconds. Be aware that the scatter plots for the motion, sonic and vision alarm levels viewers are comprehensively managed from the Setup dialog's Properties page.
The Alarms page may be used to allow WAV101 to communicate results to the outside world. In case of process automation or if robot guidance is required, consider the Alarms page's Contact URL response as the primary means of communication to any interfacing circuitry. It has been designed to report its findings, through a http request post, in the form of an XML document, data set.
Especially note that although auto-focus and light-compensating cameras are advantageous for surveillance, they are generally not suitable for machine vision applications. That is; machine vision applications expect strictly controlled staging for optimal performance. Therefore, both the camera and its illumination source must be chosen appropriately.